



Flynn Daunt
Science & Technology Editor
“It’s a cute robot.”
That’s how Michael Jenkin explains why his project has been getting so much media attention. Jenkin, professor of computer
science and engineering at York, has been working on the AQUA robot for about 10 years now, through multiple generations of the robot, with each providing new insight into the forefront of robotic mechanics.

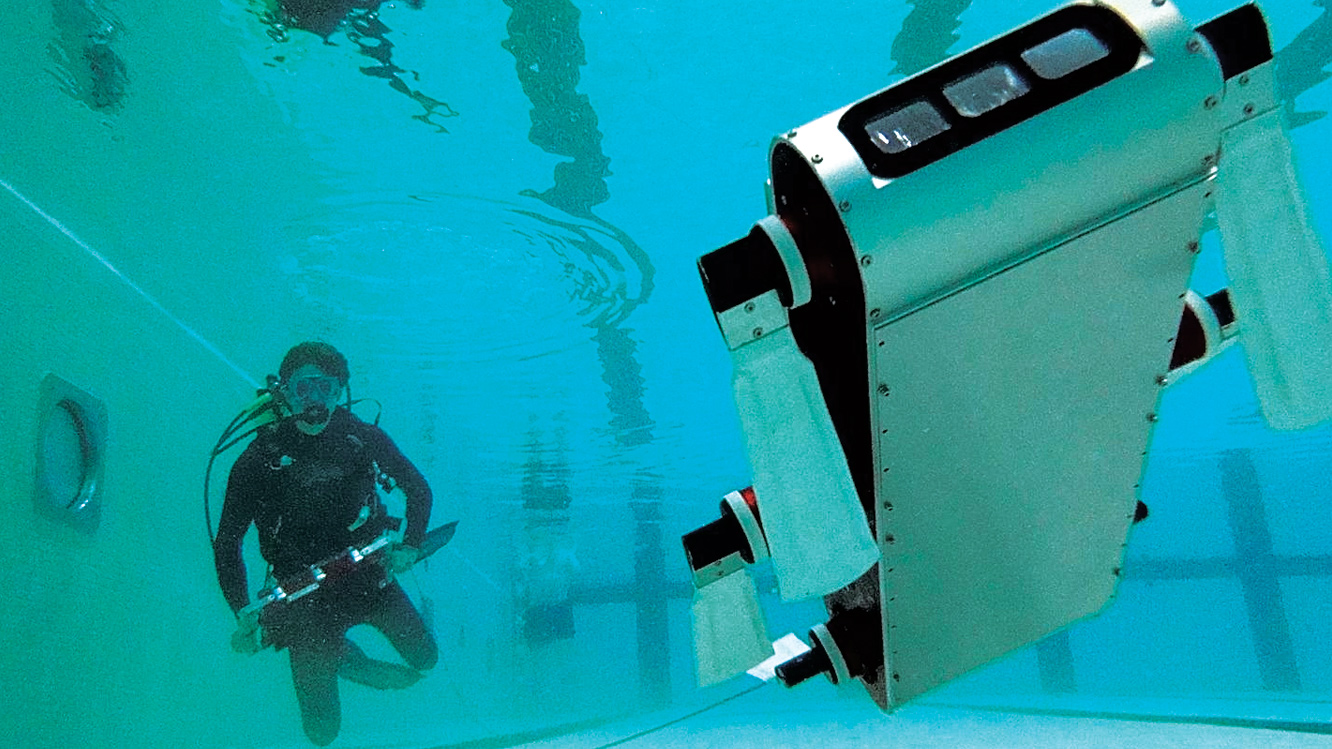
This swimming robot can not only dive underwater, but, thanks to the use of flippers instead of jet propulsion, can walk on land.
Jenkin thinks flippers have certain advantages over other aquatic robots, which may use other propulsion. One is heightened mobility, with the ability to move vertically with ease; another advantage is that its flippers would not cause any real harm to anyone nearby if it hit them.
According to Jenkin, the robot has provided better insight into navigation, locomotion, sensing and vehicle design.
Take, for instance, AQUA’s control system. The research team was tasked with finding a way to have the robot travel with some autonomy, but also with some control for the user.
A tether system didn’t allow the robot to have freedom of movement, and another solution, to hold up signs for the robot, left the robot unable to respond to the researchers.
Project partner Bart Verzijlen- berg worked to solve this problem by creating a brand new naviga- tional control system.
For his master’s thesis, he developed a mix between the two previous systems. The AQUA- tablet – a waterproof tablet which looks much like a larger version of the iPad – can display signals for the AQUA robot to see optically, and receive signals and telemetry from the robot. It can also be used to drive the robot remotely by tilting the pad much like a Nintendo Wii controller.
The AQUA robot can take over dangerous roles that would endanger the life of a scuba diver while still giving it the ability to navigate almost as efficiently as a human.
The robot has garnered much interest from various organiza- tions, and is currently being used to study three-dimensional modelling under the sea.
“It could be as simple as, ‘What’s the growth of zebra mussels on a pipe underwater?’ to as complex as how an underwater structure is decaying over time,” said Jenkin.
Jenkin thinks of the media attention on the internet and in news magazines as a good thing. “One of the things that’s difficult to do is to take a research project, and do – and get traction in – media coverage,” said Jenkin.
“When we started I had certainly not expected there to be this interest – but then again, the robot is pretty cool,” added Verzijlenberg.
“Unlike many other robots that are larger and more industrial, the AQUA robot appears much more natural, especially when people see it swimming. It moves with fins, not thrusters, and has no large mechanical arms. I think that more natural look is what grabs attention initially.”
Since much of the recent funding has come from NSERC, a federal organization that gives grants to research projects, Jenkin seems pretty happy that the public likes his work.
“The money comes from Canadian citizens,” said Jenkin. “They get to see what is being done with their money.”
The AQUA robot continues to evolve and change, providing new insight into different areas of research. The project has been such a success that already components and versions of the robot have been sold to various industrial and academic organizations.
Amphibious robot developed at York
About the Author